
PSF estimation |
Analysis of the stellar field |
PSF enhancement |
The PSF is treated as a template for all the stars in an isoplanatic patch, so its knowledge is of basic importance for a reliable analysis.
The PSF is the median of a set of suitable stars selected by the user, cleaned from the most contaminating sources, background-subtracted, centered with sub-pixel accuracy and normalized. The centering is performed by an iterative shift of the stellar image in order to cancel the sub-pixel offset of its centroid. The halo of the retrieved PSF is then smoothed, applying a variable box size median filtering technique.
The PSF extraction procedure is able to reconstruct approximately the core of saturated stars, replacing the corrupted pixels with the central part of a preliminary estimate of the PSF. Accurate positioning is accomplished by means of a cross-correlation technique, whereas the scaling factor is determined with a least squares fit to the wings of the star to repair.
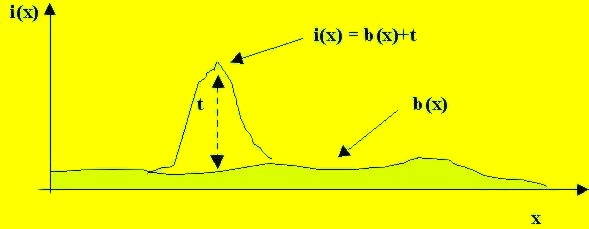
A flow-chart of the algorithm is shown in Fig.3. The starting point is a list of the presumed stars, that includes the relative maxima which fulfill the condition i(x,y)> b(x,y)+t,
where i(x,y) is the observed intensity, b(x,y) the background emission and t a fair detection threshold (Fig.1). A preliminary image smoothing reduces the incidence of noise spikes.
The presumed stars are listed by decreasing intensity and analyzed one by one. In order to illustrate a generic step of the algorithm, we assume that the first n objects have already been examined and that a suitably scaled and positioned replica of the PSF has been put in a 'synthetic stellar field' for each star detected up to this point. We consider now the (n+1)-th object in the list. First of all a small sub-image of fixed size is extracted around the object (Fig.2,left).
This sub-image may contain brighter stars already analyzed, fainter objects neglected in the current step and PSF features of other stars lying both within or outside the sub-image support. The complexity of the PSF features might lead to spurious detections: to assess the reliability of the object of interest we subtract the local contribution due to the background and to the brighter stars, derived from the synthetic field (Fig.2, right).
If a statistically significant residual can still be identified above the local background, it is compared to the PSF with a correlation check, as an objective measure of similarity. The object in hand is then accepted as a star if the correlation coefficient is greater than a selected level, and its position and flux are obtained by means of a local fit, performed on a small sub-image of size comparable to the diameter of the first diffraction ring of the PSF.
The fitting model includes the contribution of the bright stars outside the fitting region known from the synthetic field, a slanting plane representing the local background and a sum of shifted weighted replica of the local PSF, one for each point-source identified in the fitting region.
Sub-pixel astrometric accuracy is achieved by a non-linear optimization of the star positions, which is based on the interpolation of the given PSF array. A similar technique has been described by Véran and Rigaut. If the fit is acceptable the star field catalogue and the related syntethic image are upgraded by the new entry.
The basic step described above (detection of the suspected stars and analysis) may be repeated: a new list of presumed stars is formed after subtracting the previously detected ones and the analysis is started again on the original image. This iteration is very useful to detect stars in crowded group, down to separations comparable to the Rayleigh limit for the detection of close binaries.
An optional deblending mode is available. All the objects somewhat more extended than the PSF are considered blends. The measurement of the area is based on thresholding the object at a pre-fixed level below the peak, after subtracting the local background and the other known stars around. The deblending strategy consists of an iterative search for residuals around the object and subsequent fitting; the iteration stops when no more residual is found or the fit of the last residual was not successful.
At the end of the overall analysis, it is possible to run again the PSF extraction procedure, exploiting the upgraded estimates of the image background and of the contaminating sources around the PSF stars: this should allow a better determination of the PSF. Then a more accurate analysis can be performed.

[Home|Authors |Presentation|Analysis |Fitting|Applications| IDL code]